
Vous aurez besoin d’une variété de composants pour calibrer votre routeur CNC à l’aide d’Arduino. Ceux-ci incluent le logiciel GRBL et le shield CNC Arduino. Disons que vous avez un routeur CNC que vous souhaitez calibrer avec Arduino.
- GRBL est un firmware open-source qui permet à vos routeurs de contrôler leur mouvement. Il est facile d’installer GRBL sur l’Arduino. Cette combinaison crée un contrôleur CNC puissant qui peut être calibré par le routeur. Le GRBL convertit l’entrée de code G en code G et émet la sortie de commande du moteur via la carte Arduino. GRBL convertit l’entrée de code G en sortie de mouvement de moteur à partir de machines (routeurs).
- Arduino – Comme nous l’avons déjà mentionné, une carte Arduino est requise, généralement une Atmega328 Arduino Nano ou UNO.
- Pilotes – Pour piloter des moteurs pas à pas pour routeurs, vous aurez besoin de pilotes tels que les pilotes DRV8825 ou les pilotes A4988.
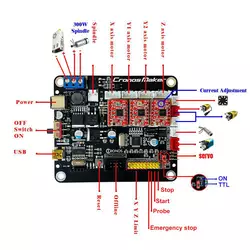
- Arduino CNC Shield – Ce matériel connecte les pilotes de moteur pas à pas à la carte Arduino. C’est le moyen le plus simple d’utiliser toutes les broches de votre Arduino pour tout connecter sur le routeur, y compris sa broche et ses commutateurs de fin de course/homing ainsi que ses moteurs pas à pas.
Pour calibrer un routeur CNC compatible Arduino, j’ai pris l’exemple d’un. Le même principe s’applique à toutes les machines CNC, qu’il s’agisse de découpeuses laser, de fraiseuses, de découpeuses de mousse, ou autres.
Pour calibrer votre routeur CNC, vous devrez d’abord installer le logiciel GRBL sur la carte Arduino. Cela nécessite un programme multiplateforme appelé Arduino Integrated Development Environment. L’étape suivante consiste à télécharger et télécharger GRBL sur Arduino. Il peut être téléchargé sur github.com
Remarque : téléchargez les fichiers GRBL au format .ZIP puis :
- Extrayez tous les fichiers en ouvrant l’archive grbl-master.zip
- Ouvrez l’interface IDE Arduino et suivez le chemin suivant : Sketch Include Library Add.ZIP Library
- Ajouter une nouvelle bibliothèque à votre interface
- Accédez au dossier extrait grbl-master. Sélectionnez le dossier grbl-master, puis cliquez sur le bouton pour l’ouvrir.
Ensuite, installez GRBL sur votre bibliothèque Arduino. Suivez ces étapes pour ce faire :
- Fichier > Exemples > grbl > grblUpload
- Un nouveau croquis s’affichera que vous devrez télécharger sur Arduino
- Sélectionnez la carte Arduino et son port, cliquez sur Upload et le tour est joué
Contrôle GRBL
L’installation GRBL permettra à votre Arduino de lire et de contrôler le routeur CNC selon les codes G. Pour transférer le code G d’Arduino vers un logiciel de contrôleur (GRBL Controller), vous devrez installer ce logiciel. Cela indiquera à l’Arduino comment fonctionner. Il existe de nombreux contrôleurs GRBL, à la fois commerciaux et open-source. Cependant, je vous recommande d’utiliser le programme open-source comme Universal Gcode Sender.
Semblable au téléchargement GRBL, vous devrez télécharger la version compressée de ce logiciel de contrôleur. Ensuite, accédez au dossier bin pour tous les fichiers ugsplatfrom. Vous devrez installer JAVA Runtime Environment car il s’agit d’un programme basé sur Java.
Accédez maintenant au contrôleur pour configurer votre routeur CNC et les paramètres GRBL. L’assistant de configuration UGS est requis pour ce faire. Cet assistant vous permet de calibrer votre routeur CNC. C’est plus facile que de taper manuellement des commandes via l’interface Serial Monitor d’Arduino. Vous pouvez maintenant surveiller et changer la direction des moteurs de votre routeur, ajuster la rotation du moteur et ajuster les paramètres pas/mm. L’assistant calculera la valeur et vous avertira lorsqu’elle devra être mise à jour.


